MyoAssist
An open-source Python toolkit for simulating and optimizing assistive devices in neuromechanical simulations
This site is a hands-on tutorial for MyoAssist. Once you finish the tutorial, please share your feedback via the Survey link in the header. If you encounter any technical issues, please open a ticket in the GitHub repo via the Issues link in the header.
MyoAssist is a package within MyoSuite, a collection of musculoskeletal environments built on MuJoCo for reinforcement learning and control research. It is developed and maintained by the NeuMove Lab at Northeastern University. We aim to bridge neuroscience, biomechanics, robotics, and machine learning to advance the design of assistive devices and deepen our understanding of human movement.
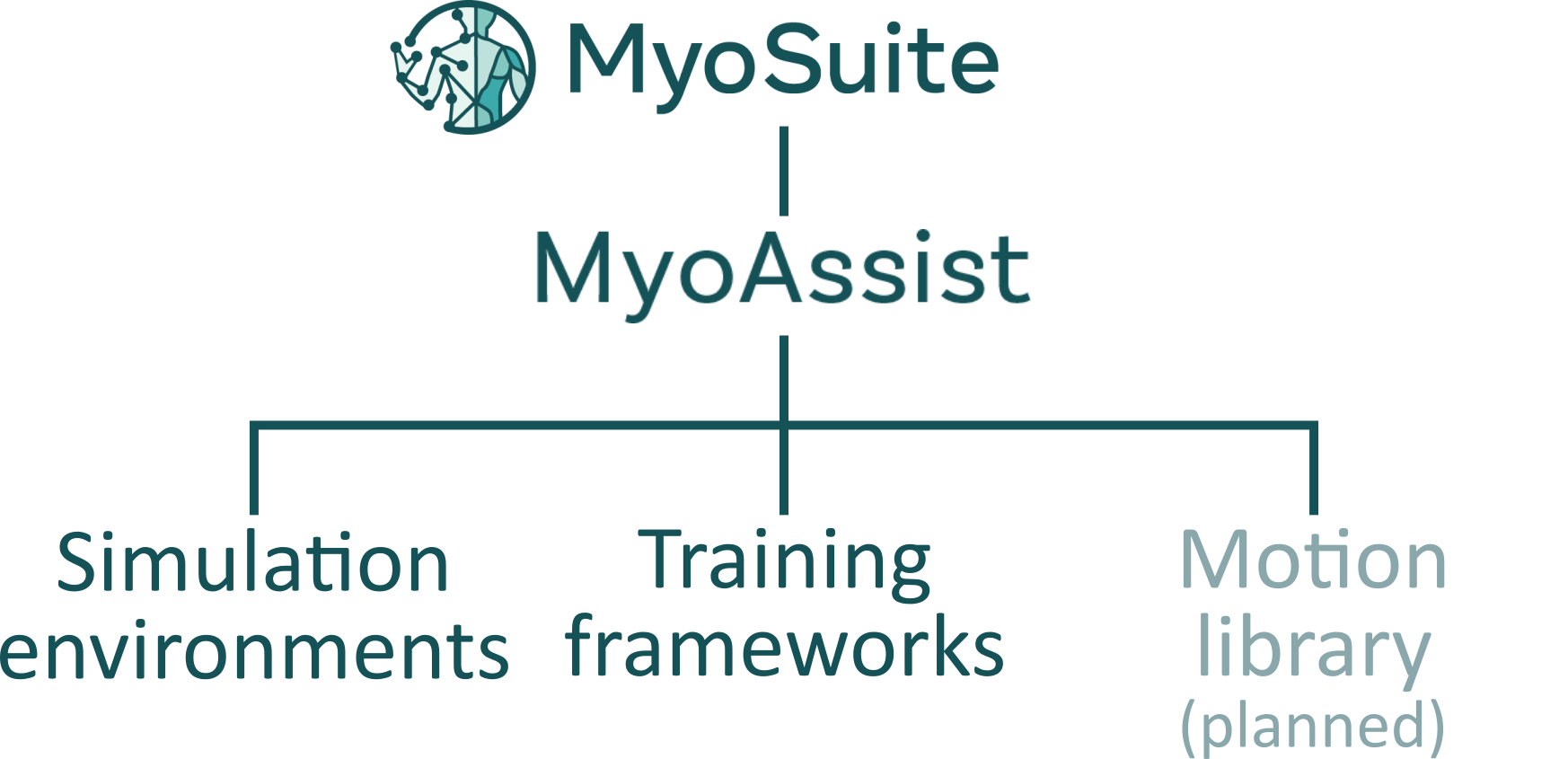
MyoAssist consists of three main components that together support simulation, training, and analysis of human–device interaction:
1. Simulation Environments
Forward simulations that combine musculoskeletal models with assistive devices.
- Currently available:
- Lower-limb exoskeletons and robotic prosthetic legs
- Planned additions:
- Upper-body wearable devices: prosthetic arms, back orthoses, etc.
- Non-wearable assistive devices: wheelchairs, externally actuated supports, etc.
- Includes baseline controllers for common assistive scenarios
2. Training Frameworks
Tools to generate control policies or optimize behavior in simulation.
- Reinforcement Learning (RL)
- Framework: Built on Stable-Baselines3 and PyTorch
- RL methods: Standard reinforcement learning, imitation learning, and transfer learning
- Network architecture: Modular multi-actor networks for separately controlling human and exoskeleton agents
- Controller Optimization (CO)
- Reflex-based control models
- CMA-ES for parameter tuning
3. Motion Library (planned)
A curated dataset of human movement, both real and simulated.